CAMMSE Research Update

Now in its fourth year, the UNC Charlotte-led Center for Advanced Multimodal Mobility Solutions and Education (CAMMSE) has completed 27 transportation-related research projects and has another 33 currently underway, including research into the optimization of autonomous vehicles, analysis of cycling behavior based of crowdsourced data, and optimization and improvement of current public transit services.
Established in December 2016, CAMMSE is a five-year, multi-university transportation center funded by a $7.7 million grant from the U.S. Department of Transportation under the Fixing America’s Surface Transportation (FAST) Act. Multimodal transportation refers to the integrated network of roads, airports, seaports, rails, transit systems, and bicycle and pedestrian trails and walkways.
UNC Charlotte spearheads the consortium of five universities, with other member being the University of Texas at Austin, the University of Connecticut, Washington State University – Pullman, and Texas Southern University. The principal investigator and director of CAMMSE is Dr. Wei Fan of UNC Charlotte’s Civil and Environmental Engineering Department.
“Time certainly flashes by quickly,” Dr. Fan said. “The center has been extremely active, and it’s hard to believe we are already in our fifth year.”
 CAMMSE mission is to address the US DOT FAST Act’s research priority area of “Improving Mobility of People and Goods.” To achieve this, CAMMSE members are developing advanced technology, methods and models for multimodal transportation, and are educating and developing the next generation of transportation leaders.
CAMMSE mission is to address the US DOT FAST Act’s research priority area of “Improving Mobility of People and Goods.” To achieve this, CAMMSE members are developing advanced technology, methods and models for multimodal transportation, and are educating and developing the next generation of transportation leaders.
“We have been and continue to be successful in achieving our mission,” Dr. Fan said. “CAMMSE has become a vibrant multidisciplinary program creating exciting opportunities for students to learn, and engaging faculty in world-class research. As a result, our research has delivered impactful products to local, regional and national stakeholders.”
Some of the recent UNC Charlotte CAMMSE member’s accomplishments from the period Oct. 2018 to Sept. 2019 include:
Research Capabilities: UNC Charlotte researchers published 23 peer-reviewed journal papers, made 27 presentations and published five technical research reports. Research results were published in several high-quality journals, including Accident Analysis and Prevention, ASCE Journal of Transportation Engineering, Journal of Transportation Safety & Security, and IEEE Transactions on Vehicular Technology.
Leadership: Center Director Dr. Wei Fan served as a Handling Editor on the Transportation Research Record Inaugural Editorial Board, and an Associate Editor for the ASCE Journal of Transportation Engineering, IEEE Transactions on Intelligent Transportation Systems, and the International Journal of Transportation Science and Technology. UNC Charlotte researchers also chaired and served on several other professional committees and review panels (e.g., ASCE, NCHRP, NSF, PENC and TRB).
Education and Workforce Development: Three existing undergrad courses and four existing graduate courses were taught by center staff. Eight graduate students were involved with CAMMSE research projects. Drs. Pando, Weggel and Kane successfully held the UNC Charlotte Transportation Summer Camp in 2019. Six UNC Charlotte ITE student chapter bi-weekly seminars and 29 UNC Charlotte transportation graduate student weekly seminars were held in the reporting year.
Technology Transfer: Nine invited presentations were made at seven different universities in China. Eighteen presentations were also made at various conferences on different occasions.
Collaboration: Center personnel collaborated with several universities across the country and also abroad, and successfully built strong working relationships with the North Carolina Turnpike Authority Automated Vehicle Proving Ground, North Carolina A&T State University, and North Carolina State University.
Some of the 33 CAMMSE projects currently underway include:
Optimizing Transit Equity and Accessibility by Integrating Relevant GTFS Data Performance Metrics
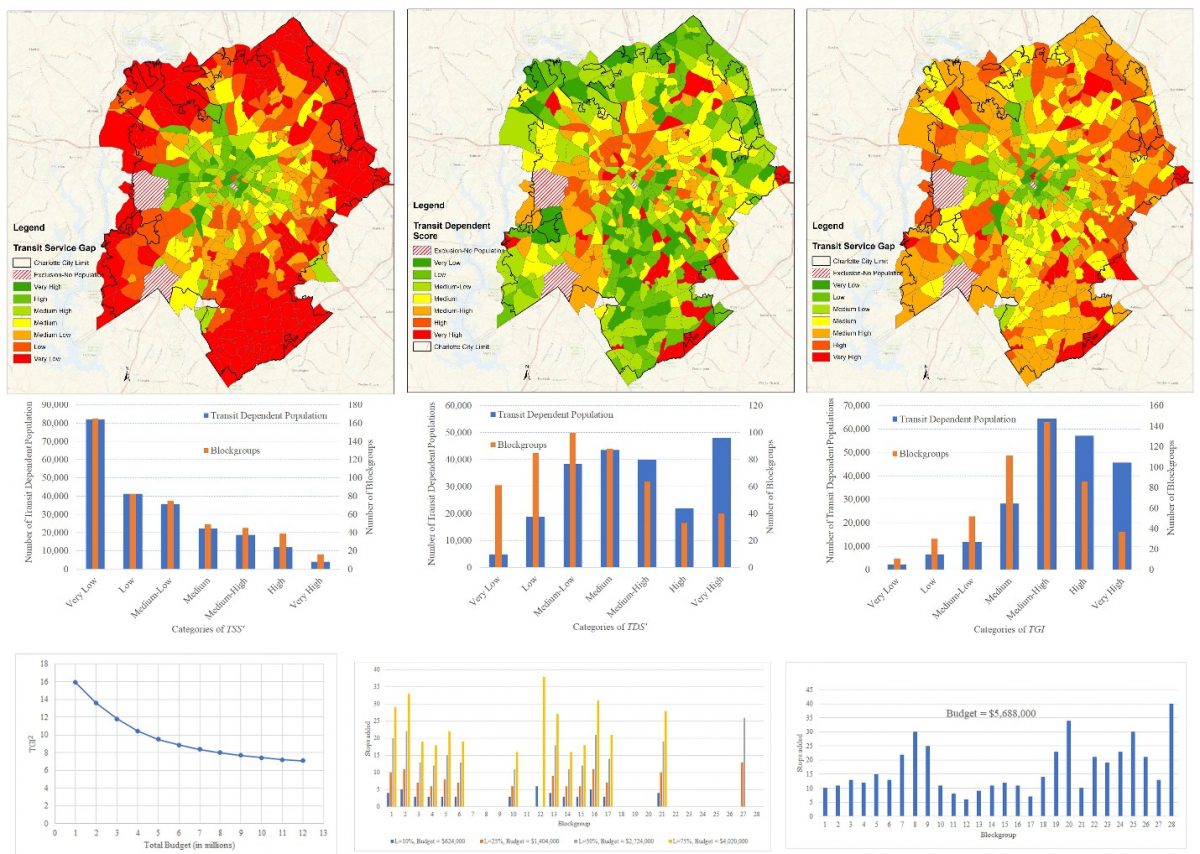
One critical task in transportation planning is to optimize the public transit service for people by improving current service. The main objective of this project is to develop optimization models for improving transit equity and accessibility for people by integrating the transit gap index (TGI), for a performance metric using the General Transit Feed Specification (GTFS) data.
TGI is developed by taking into consideration demographic features, as well as spatial and temporal transit service characteristics. Two models are built with the intention to optimize the transit equity by mitigating the transit deficiency (i.e., TGI). Two different conditions are considered while developing both models, which are: 1) maximizing the level of transit services under the constraint of limited budget that will be invested into the new constructions of public transit stops; 2) minimizing the total cost for constructing new public transit stops with constraints on certain improvements of transit services for certain amount of blockgroups. Finally, a case study in the City of Charlotte is conducted, and comprehensive numerical results and analyses based on the proposed models are provided.
Analyzing Cycling Behavior During Different Time Periods Using Crowdsourced Bicycle Data
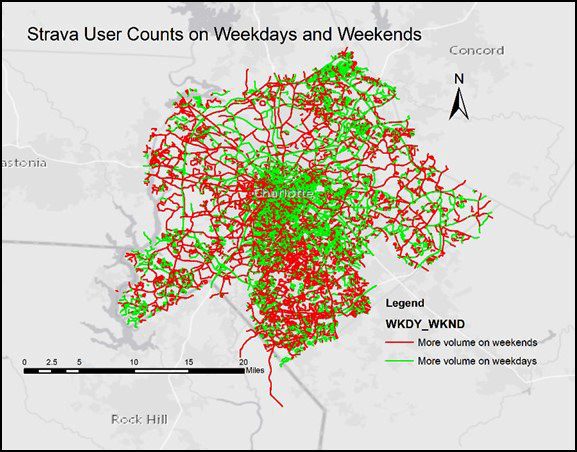
This research concentrates on the analysis of cycling behavior utilizing crowdsourced bicycle data collected from Strava in the City of Charlotte. From the link-based cycling behavior prospective, several discrete choice models have been developed to model the preference of roadway segments of their cycling routes during different time periods.
Factors including road characteristics, bike facilities, day of week etc. have been carefully examined to gain a better understanding of the variables that have significant impacts on link-based cycling behavior. From the route-based cycling behavior prospective, a method has been provided to guide researchers to analyze cycling route choice including a choice set generation method and a Path Size Logit model for future route choice analysis. The following figure shows the different cycling activities occurred on weekdays and weekends, where red lines represent the higher bicycle volume on weekends and green lines depict the higher volume on weekdays. According to this figure, the uptown area in the City of Charlotte appears to have more green lines, which indicates more weekday cycling trips in this location.
Trajectory Optimization of Connected and Autonomous Vehicles (CAVs) at Signalized Intersections
With the capability of vehicle to infrastructure (V2I) and infrastructure to vehicle (I2V) technologies, CAVs can receive real time information on roadside infrastructures (e.g., signal timing plans and speed limits). With this information, CAVs can coordinate their maneuvers accordingly.
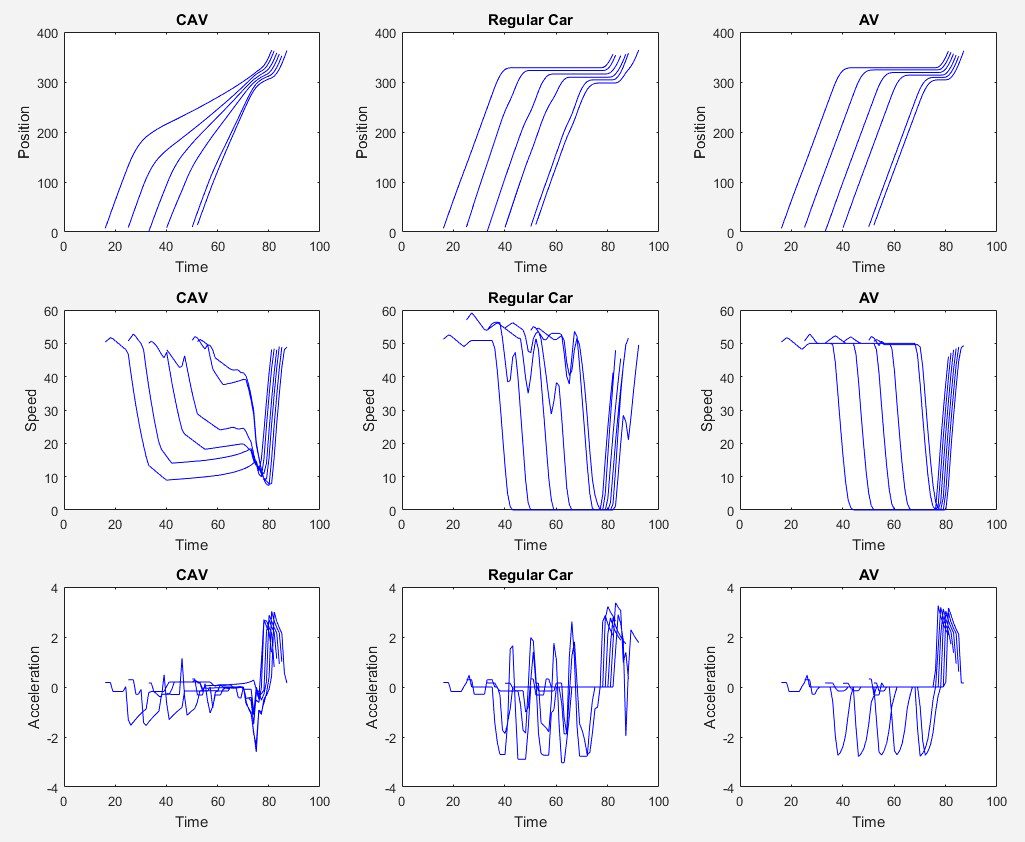
For an intersection, CAVs can receive real time signal timing from intersections ahead through I2V technology. Therefore, they can adjust their speed accordingly to arrive in green and pass the intersection without stopping. The optimized trajectories of CAVs approaching the signalized intersection will decrease the travel delays at the intersection as well as the vehicle emissions. This research quantifies the impact of CAVs on signalized intersections, and establishes new guidelines in order to be suitable for use in conducting various types of analyses involving CAV strategies at signalized intersections. A case study is conducted with a signalized intersection in Charlotte, North Carolina. The selected signalized intersection is simulated in VISSIM software to explore the impact of CAVs on the intersection. The performance of the proposed strategy is evaluated by comparing the vehicle trajectories, speeds, and acceleration rates of CAVs, Autonomous Vehicles (AVs), and regular vehicles.
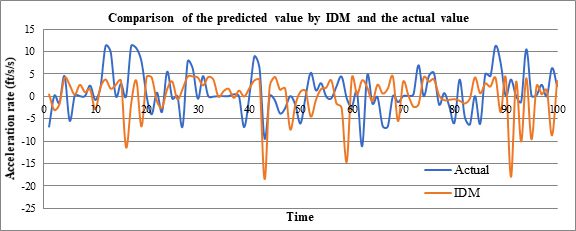
Machine Learning-based Trajectory Optimization of Connected and Autonomous Vehicles
As the rapid development of CAV technologies, CAVs are anticipated to penetrate into the market in the near future. CAVs can receive information on their leading vehicle (e.g. speed, acceleration rate, and location) through sensors and vehicle to vehicle (V2V) technology. According to these information, CAVs can adjust their acceleration rate which is the deterministic factor of their future trajectories.
This ongoing research will develop machine learning approaches to predict the acceleration rate of the object vehicle. Next Generation Simulation (NGSIM) datasets are utilized for training and testing the machine learning models. The proposed models will be compared with the Intelligent Driver Model (IDM). The performance of the models will be evaluated by Root Mean Square Error (RMSE) and Mean Absolute Error (MAE).